 |
A friend had built a novelty paddle steamer "PS Panjandrum" and wanted an engine sound effect. I found a guy selling PIC chips programmed as psuedo random noise generators which gave a nice "hiss"and the boat had a microswitch operated by a cam on the paddle shaft to cyclically interrupt it. Testing the unit prior to installation I coupled the enable input of the PRNG to a (square wave) signal generator - this had a wide wide frequency range and adjustable mark/space and idly turning up the speed from the required "chuff, chuff" I started to hear a sound not unlike a first world war aero engine ticking over. Playing with the mark/space had interesting effects too. Much later on I discovered the PICAXE 08 chip and became aware that passing arguments 128 to 255 to the PICAXE "sound" command produced random noise of ascending pitch. So remembering my earlier discovery I began experimenting at the "hissy" end of the scale. By letting out slices of noise of varying pitch and duration in a cyclic manner (to give the engine a characteristic 'beat') I rapidly had an algorithm to use. |
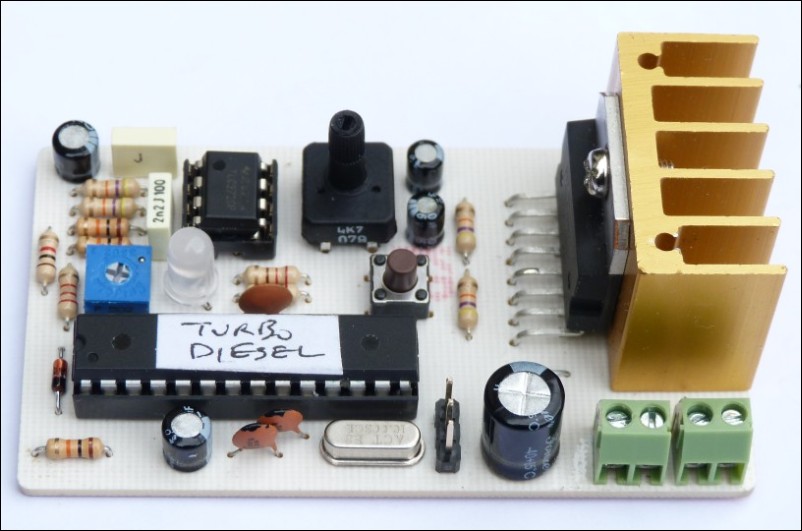
I reasoned that internal combustion engines produced puffs of exhaust gas from each cylinder in turn so that was probably the reason why this algorithm was successful. Tweaking the values to get the final results took days of experimentation nearly costing me my sanity and hearing! To alter the 'speed' of the engine I varied the gap between each slice of noise - this was updated once per rev by reading a pot on the ADC input (the speed demand input needs to be rapidly acquired as it is part of the engine loop). So to make a complete unit, a further PICAXE 08 was pressed into service to read an RC input and adjust the mark/space of a PWM stream accordingly. This stream was low pass filtered by a resistor/capacitor and fed to the ADC input of the sound chip. I also needed to include a lookup table to linearise the otherwise reciprocal characteristic of the engine algorithm. The auto-start on throttle, time-out on idling, startup and rundown sounds, cylinder count configuration etc were also required to complete the product of course.
|
I'd been getting my electronic components (including PICAXEs) by calling in at Technobots who, at that time, were local to me. Chatting with Paul Cooper (Mr T), he was keen to promote interest in and sales of PICAXE chips and I was persuaded to publish a DIY article on the Technobots website describing the engine sound unit. This article was duplicated on the Solent Radio Control Model Boat Club (SRCMBC) site. A Youtube video of the prototype was also published in 2009 (58,000 views to present date). That opened the flood gates and I came to dread opening my e-mail every morning as enthusiasts with little or no soldering and breadboarding skills wanted me to help to get their units going. Solder bridges, solder whiskers, incompletely cut veroboard tracks, misplaced veroboard cuts, wrongly identified resistors, components misaligned with their correct positions, problems installing the PICAXE Programming Editor . . . . . . I'm sure you get the picture! I realise that might sound rather arrogant of me, but I was in my own back yard here and these guys could build exquisitely detailed boats whereas my efforts used Flora tubs for the cabins and toilet rolls for the funnels - each to his own! |
|

|
|
So, given the popularity of the unit, to sidestep this issue a PCB was designed and from then on the constructional details and code were removed from the Technobots and SRCMBC sites and units were supplied ready made. |

|
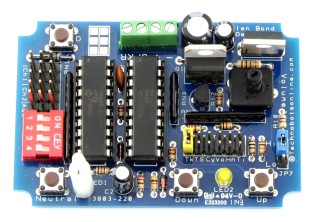
Later on the 20M2 PICAXE came to my attention and with 11 ADCs and far more memory I thought I could make a unit where parameters like tickover, top speed etc could all be pot adjustable. A protype was shown on Youtube in 2010 - almost 14,000 views to present date. By 2012 I'd finalised the design now using a jumper on a set of headers to select the parameters and '+' and '-' buttons to make adjustments. A PCB was designed and the unit was again marketed by Technobots - almost 21,000 Youtube views of this unit to present date. By now I'd developed a method of adjusting the pitch and duration parameters for each cylinder in real time - previously it involved painstaking editing and re-programming - and this is a feature of the 20M2 based unit - users can design their own engine 'voices' in addition to the 10 factory presets. It has to be noted that not every pitch and/or duration makes a sensible sound, but there are plenty that do if you hunt them down. |
 |
 |
The launch of the vastly improved 08M2 chip finally gave me the impetus to revise the original 08 based sound unit. Still the same sound algorithm but taking advantage of improved memory, speed and new commands I was able to implement lots of 'voices' and adjustments. The novelty is that the unit is externally adjustable from the RC transmitter, using the throttle stick to adjust parameters. To avoid the boat responding during parameter adjustment a neutral (STOP) signal is passed to the ESC instead. The necessary inter-chip communication is achieved using the 15 step DAC to output various status and commands, the DAC level being read by an ADC in the receiving chip. |
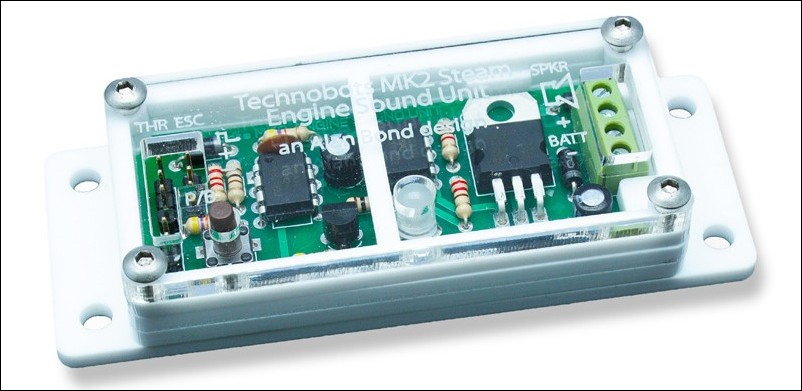
| Following an amicable agreement with Technobots, they are ceasing to supply the above unit and I've just released a (functionally identical) smaller version of it, packaged in a 3D printed case which I will market under the Forge Electronics banner. |  |
 |
Where do I go from here? I've successfully implemented the same sound sets on an Arduino Nano, altered the set-up to use 'select', 'up' & 'down' buttons and incorporated a user adjustable volume control which can also be set to cause the volume to increase with the speed, plus a (synthesized) horn that replaces the engine sound when operated. This works a treat but is on the back burner at present. |
| I've also been able to play wav files of 'real' engine sounds embedded in the Arduino program memory, but file storage is limited to about 3 seconds of 8k sampled audio which is looped and played back at a speed proportional to the throttle setting. I don't propose to continue with this approach. |
|
|
|
This is an early proof of concept unit storing audio files on an SD card using the Arduino WavShield. I have a microSD card adapter ready to interface to an Arduino Nano, but little time or enthusiasm to get on with it! |

| Currently all my efforts are being expended on variants of the model aircraft timer units (found elsewhere on this site) and a gun controller for model warships using stepper motors so a full 270 degree rotation (or even continuous rotation) can be achieved. The unit also has an mp3 player module with integral 3W amplifier for issuing the 'bang' plus it drives a remote white LED to give a muzzle flash. | 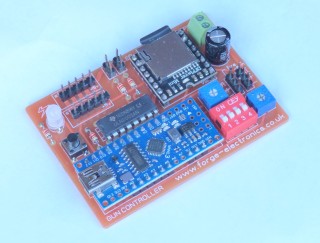 |